Fingertip wearable electrohydraulic haptic interface
Fingertips are one of the most sensitive regions of the human body and provide a means to dexterously interact with the physical world. To recreate this sense of physical touch in a virtual or augmented reality (VR/AR), high-resolution haptic interfaces that can render rich tactile information are needed. In this paper, we present a wearable electrohydraulic haptic interface that can produce high-fidelity multimodal haptic feedback at the fingertips. This novel hardware can generate high intensity fine tactile pressure (up to 34 kPa) as well as a wide range of vibrations (up to 700 Hz) through 16 individually controlled electrohydraulic bubble actuators. To achieve such a high intensity multimodal haptic feedback at such a high density (16 bubbles/cm 2) at the fingertip using an electrohydraulic haptic interface , we integrated a stretchable substrate with a novel dielectric film and developed a design architecture wherein the dielectric fluid is stored at the back of the fingertip. We physically characterize the static and dynamic behavior of the device. In addition, we conduct psychophysical characterization of the device through a set of user studies. This electrohydraulic interface demonstrates a new way to design and develop high-resolution multimodal haptic systems at the fingertips for AR/VR environments.
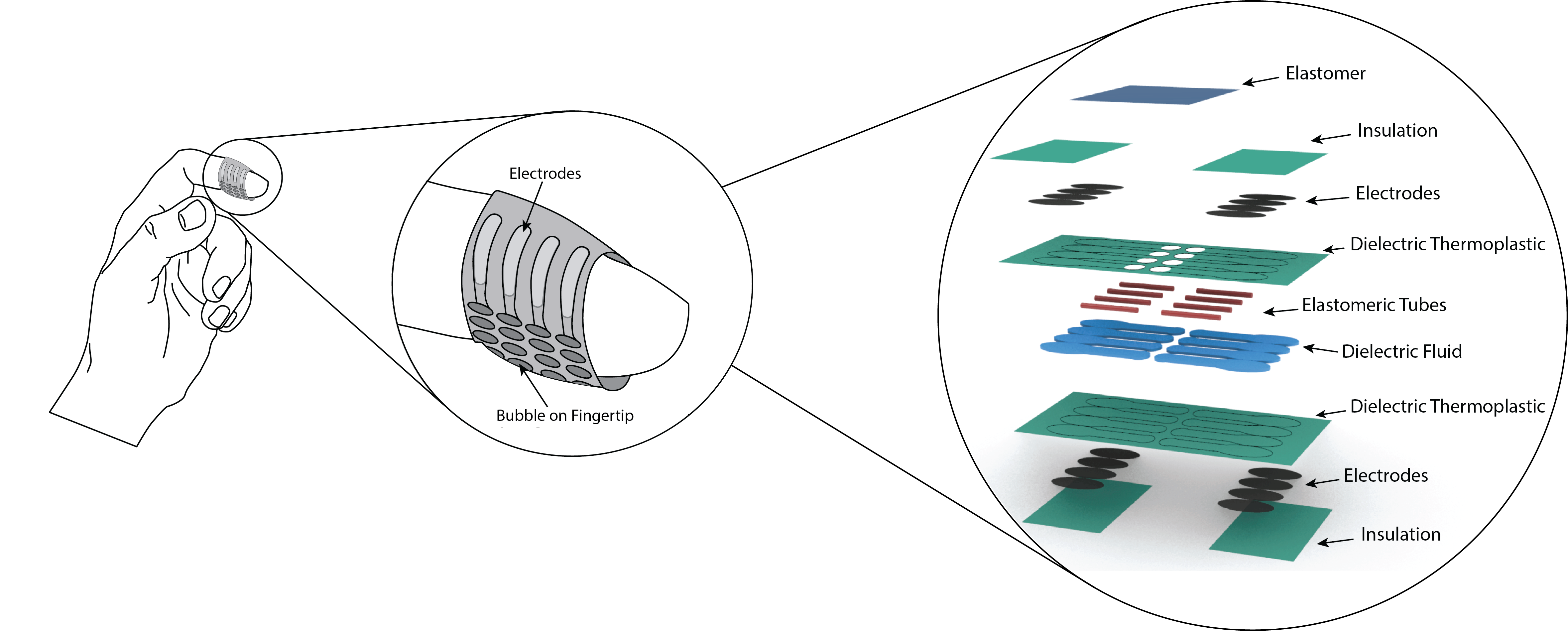
Construction of the fingertip wearable ElectroHydraulic Haptic Interface. The design consists of 16 actuators that are fabricated in two separate layers. Each layer holds 8 actuators entirely insulated from each other. Figure above shows the exploded view of all the components that go into the construction of a single layer of 8 actuators.
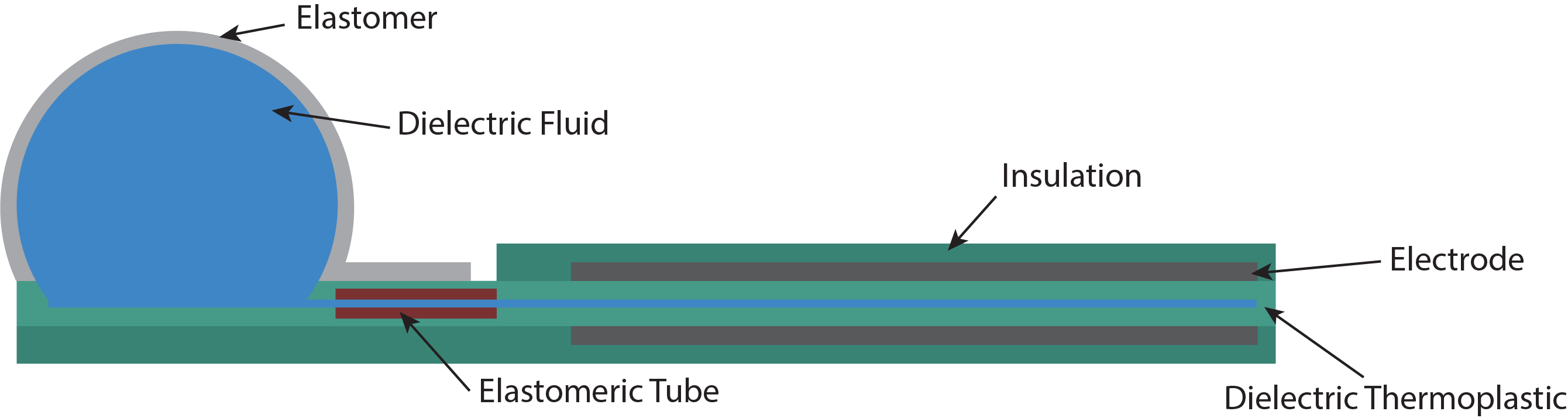
The tactile bubble consists of a top stretchable layer and bottom non-stretchable layer that gives it ability to inflate asymmetrically in a preferred direction. The electrohydraulic chamber is made out by trapping a small amount of dielectric fluid in between two layer of a dielectric thermoplastic film that are covered with flexible electrodes (conductive carbon tape) on the outside. The electrodes are further insulated with another layer of dielectric film whose edges are further secured with polyimide tape. The neck of the actuator is embedded with elastomeric (silicone) tubes that prevent buckling of the fluidic channel when bent around the finger.
Figure below shows the schematic of a single bubble actuator in inflated state [(when a high Voltage (4000-5000 Volts) is applied to the electrodes].